COURBES DE POURSUITES MUTUELLES (ou courbes des n chiens)
Mutual
pursuit curves, Gegenseitige Verfolgungskurven (od. Käferbahnen)
| courbe suivante | courbe précédente | courbes 2D | courbes 3D | surfaces | fractals | polyèdres |
COURBES DE POURSUITES MUTUELLES (ou courbes des n chiens)
Mutual
pursuit curves, Gegenseitige Verfolgungskurven (od. Käferbahnen)
| Problème posé par Lucas en 1877 dans le
cas d'un triangle équilatéral [problème des
trois chiens, Nouvelles Correspondances Mathématiques 3 p 175-176].
Article Polygons of pursuit, Bernhart, 1959 Wikipedia : Problème_des_souris Blog en anglais : mathtourist.blogspot.com/2020/12/pursuing-pursuit-curves.html Animation de G. Tulloue : www.sciences.univ-nantes.fr/sites/genevieve_tulloue/Meca/Cinematique/4mouches.php Système différentiel de poursuite, Quadrature 129, p. 29, 2023. |
 |
Lorsque n points M1,
M2,
,
Mn
(traditionnellement : des chiens, des souris, des fourmis, des punaises,
des coccinelles, ou des mouches, ...) se poursuivent mutuellement, chacun
à vitesse constante, Mk
poursuivant
Mk+1 (et Mn
poursuivant M1), les trajectoires
de ces points sont des courbes de poursuites mutuelles.
Les mouvements et les trajectoires des poursuivants sont
alors régis par le système différentiel formé
par les n relations  .
.
Il est à noter que lorsque ![]() est proportionnel à
est proportionnel à ![]() le système devient linéaire et se résout exactement.
le système devient linéaire et se résout exactement.
Cas d'un triangle ABC (A poursuivant B, poursuivant C, poursuivant A)
| Cas où les chiens ont la même vitesse.
On remarque dans le cas particulier ci-contre que les deux chiens qui étaient les plus éloignés au départ sont ceux qui se rencontrent en premier ! |
|
||
|
Cas de vitesses quelconques. R. K. Miller a déterminé en 1871 que le triangle reste semblable à lui-même si et seulement si les vitesses respectives de A,B,C sont proportionnelles à Dans ce cas, le premier point de Brocard du triangle formé par les chiens reste fixe et les chiens se rencontrent simultanément en ce point ; de plus, les courbes décrites sont des spirales logarithmiques, en conséquence de la définition tangentielle de ces dernières. |
|
||
Si chaque chien a une vitesse proportionnelle à
la distance au chien suivant, soit  dans (A, B, C) reste fixe et les chiens se rencontrent simultanément
en ce point.
dans (A, B, C) reste fixe et les chiens se rencontrent simultanément
en ce point.
Les chiens peuvent donc converger en n'importe quel point à l'intérieur du triangle. Ceci se généralise à un polygone convexe (à droite) |
|
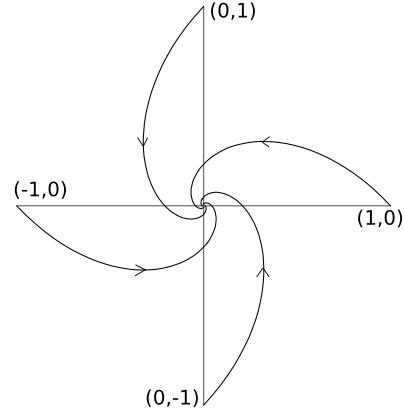
Lorsque la figure de départ est un polygone
régulier convexe, chaque point poursuivant le sommet suivant
(un sens de parcours sur le polygone étant choisi), et les vitesses
sont égales, les trajectoires sont des spirales
logarithmiques de point asymptote le centre du polygone.
Le paramètre de la spirale est ![]() ,
l'angle tangentiel polaire constant étant donc de
,
l'angle tangentiel polaire constant étant donc de  où
n
est
le nombre de côtés du polygone.
où
n
est
le nombre de côtés du polygone.
La longueur de la trajectoire de chaque chien est donc
égale à  où R est le rayon du polygone,
où R est le rayon du polygone, ![]() ,
la longueur du côté.
,
la longueur du côté.
Par exemple :  .
.
|
 |
 |
|
|
Notons que les courbes sont des développantes obliques les unes des autres. |
|
| Démonstration dans le cas d'un carré.
Les chiens forment constament un carré EFGH
avec les coordonnées indiquées sur la figure.
|
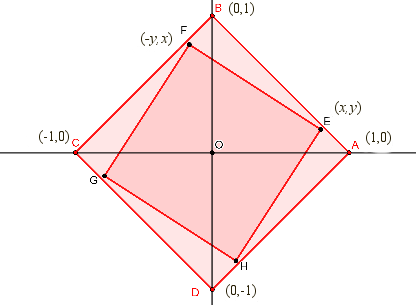
Figure : Elisabeth Busser |
 |
 |
 |
Voir aussi de telles courbes en
3D.
 |
L'artiste ivoirien anonyme créateur de cette gravure pensait-il tracer des courbes de poursuite ? |
| courbe suivante | courbe précédente | courbes 2D | courbes 3D | surfaces | fractals | polyèdres |
© Robert FERRÉOL, Alain ESCULIER 2023
 ,
les chiens ont une vitesse constante égale à
,
les chiens ont une vitesse constante égale à