HYPOTROCHOID
| next curve | previous curve | 2D curves | 3D curves | surfaces | fractals | polyhedra |
HYPOTROCHOID
| From the Greek hupo "under" and trokhos "wheel". |
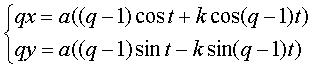
| Complex parametrization: Cartesian parametrization: |
| The hypotrochoids are the curves described by a point linked to a circle (C) rolling without slipping internally on a base circle (C0); therefore, they are the curves obtained with a Spirograph with an internal disk. | 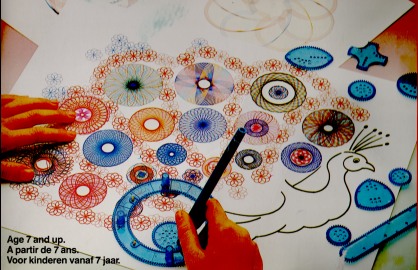 |
Another way of saying the same thing: the hypotrochoids are the roulettes of the movement of a plane over a fixed plane the base of which is a circle and the rolling curve of which is a circle inside the first one.
For d = b, i.e. k = 1, we get the
hypocycloids.
If a is replaced by  , and
d
by a b, the hypotrochoid obtained is identical to the initial
one (property called double generation of the hypotrochoid). , and
d
by a b, the hypotrochoid obtained is identical to the initial
one (property called double generation of the hypotrochoid). |
 |
We derive from this that if a is fixed but q
is changed into  and k into
and k into ![]() ,
then the hypotrochoid obtained is the homothetic image of the initial one
with ratio k. Therefore, we get all the hypotrochoids by considering
only the case
,
then the hypotrochoid obtained is the homothetic image of the initial one
with ratio k. Therefore, we get all the hypotrochoids by considering
only the case ![]() .
.
For q = 2, we get the ellipses: 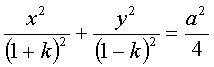 . .
The corresponding movement of a plane over a fixed plane
is also obtained by sliding.
|
 |
For q > 2, the curve is also called curtate hypocycloid if k < 1, and prolate hypocycloid if k > 1.
Be careful, according to the preceding paragraph, in the
case 1 < q < 2, the curtate hypocycloids are paradoxically
obtained for k > 1 and the prolate ones for k < 1!
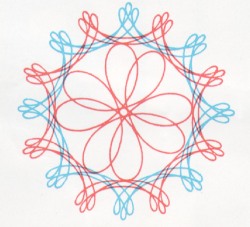
For k = q 1 (i.e. d = a
b)), we get a rose of index
n
> 1, and polar equation 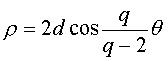 : : |
 |
Hypotrochoids can also be defined as the trajectories
of a movement composed of two circular motions in opposite directions,
with complex parametrization 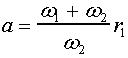 , ,  ,
d
= r2, and therefore ,
d
= r2, and therefore  ). ). |
The angular speed of the first arm (with respect to the fixed plane) is the quadruple of that of the second arm: we get a hypotrochoid with parameter q = 4 + 1 = 5. |
| Writing |
 |
Shape of the curves in various cases:
|
|
|
|
|
|
|

(see the Roman surface) |
|
|
|
 |
|
|
|
 |
|
|
|
 |
|
|
|
 |
|
|
|
 |
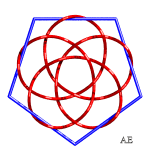
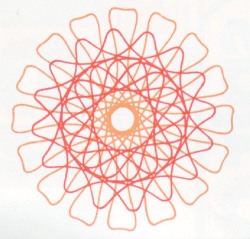
| The hypocycloid with parameter q = n/m constitutes
a "rounded" approximation of the regular
polygon of type (n, m); for the portions between two vertices
to be as linear as possible, we can consider the limit case where this
portion does not have an inflexion point, which corresponds to the case
k
= 1 / (q - 1); opposite, some views corresponding to this case.
For q = 4, this phenomenon is used in the square watch mechanism. |
Triangle, square, pentagon and star pentagon hypotrochoids (q =3, 4, 5, 5/2) |
Hypotrochoids and epitrochoids form the family of centred trochoids.
The hypotrochoids are also the plane projections of the
Caparéda
curves, or satellite
curves.
See the generalisation to polytrochoids on the page dedicated to the centred trochoids.
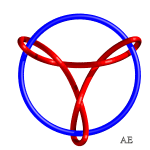
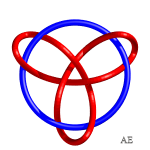
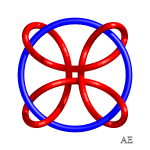
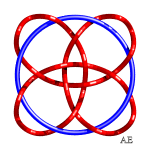
Here are various hypotrochoids in 3D and turned into knots:
 |
 |
 |
 |
 |
 |
| Link 9.2.24 | Link 9.2.40 | See this page |
| Gear belt shaped like a hypotrochoid by Lévi Capareda during one of his classes of industrial sciences... |  |
|
 |
|

Engraving by J. Mandonnet |
Drawings of Spirographs |
 |
 |

A marine Spirograph! |
| next curve | previous curve | 2D curves | 3D curves | surfaces | fractals | polyhedra |
© Robert FERRÉOL 2017
 .
.
 .
.