COURBE DE POURSUITE
Pursuit
curve, Verfolgungskurve oder Radiodrome
| courbe suivante | courbe précédente | courbes 2D | courbes 3D | surfaces | fractals | polyèdres |
COURBE DE POURSUITE
Pursuit
curve, Verfolgungskurve oder Radiodrome
| Courbe étudiée par Léonard de Vinci
et Pierre Bouguer en 1732, Du Boisaymé en 1811, Dunoyer
en 1906, et Morley
en 1921 (cas circulaire pour les deux derniers).
Autre nom : courbe du chien. |
Équation différentielle vectorielle :  ,
se traduisant par le système différentiel : ,
se traduisant par le système différentiel :
 ,
ou par le système : ,
ou par le système :  . . |
| On appelle courbe de poursuite la trajectoire
d'un mobile
M (le chien ou l'avion chasseur) dont le mouvement est
dirigé à chaque instant vers un autre mobile M0
(le lièvre ou le maître, ou l'avion chassé), dont la
trajectoire est nommée courbe de fuite. On considère
en général que les mouvements de M et M0
sont uniformes, de vitesses V et V0 =
kV.
La trajectoire de M0 étant donnée, celle de M est donc définie dans ce cas par le fait que (MM0 ) est tangente en M à sa trajectoire, et l'abscisse curviligne de M est proportionnelle à celle de M0 : |
 |
Comme on pourrait s'y attendre, le chien rattrape le lièvre à coup sûr si et seulement s'il court plus vite que lui (k < 1) ; Lorsque les deux vitesses sont égales, la distance entre le chien et le lièvre tend au cours du temps vers une constante a, et la courbe du chien tend à devenir la tractoire de celle du lièvre avec une laisse de longueur a.
I) Cas le plus simple : la courbe de fuite est rectiligne.
Le lièvre décrit Oy à la vitesse
V,
et le chien le poursuit à la vitesse V/k.
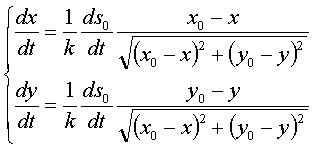
| Le chien ayant pour cordonnées (x, y), les données se traduisent par les relations : |  |
ce qui fournit léquation
différentielle de la trajectoire du chien :  |
 ,
soit ,
soit 
(  car
x
décroit) car
x
décroit) |
| Si le chien est en A de coordonnées (a, b) quand le lièvre est en O, l'intégrale première est : |  où où  |
| et on obtient la courbe d'équation : | avec  si
k
¹ 1
si
k
¹ 1
et  si
k = 1
si
k = 1 |
| La loi horaire étant donnée par : |  si k ¹ 1
si k ¹ 1
|
La courbe est algébrique ssi k est rationnel : si k = p/q avec p et q premiers entre eux, le degré est 2p pour k > 1 et p + q pour k < 1.
En particulier, pour k = 1/2, on obtient une demi-cubique
de Tschirnhausen (équation complète : ![]() ).
).
Le chien rattrape le lièvre ssi k < 1,
et il le rattrape en (0, b f(a)), soit  si b = 0.
si b = 0.
Lorsque k = 1, la distance entre le chien et le
lièvre tend vers une constante, égale à c/2.
en rouge : le chien court plus vite que le lièvre : il le rattrape. en vert : il court aussi vite : pas de rattrapage possible, et en bleu, encore moins... |
Le chien a même vitesse que le lièvre : leur distance tend vers une constante. |
Remarquons que si le chien était intelligent et
courait en ligne droite avec anticipation, il pourrait rattraper le lièvre
ssi  (pour
b
> 0) et pourrait donc toujours le rattraper s'il court aussi vite
que lui.
(pour
b
> 0) et pourrait donc toujours le rattraper s'il court aussi vite
que lui.
La courbe du chien pour 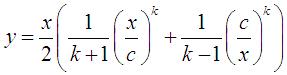 est la caustique par réflexion
pour des rayons incidents verticaux de la parabole généralisée
est la caustique par réflexion
pour des rayons incidents verticaux de la parabole généralisée 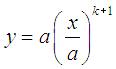 avec
avec  ; ci-contre, le cas k = 2 (parabole cubique).
; ci-contre, le cas k = 2 (parabole cubique).
Dans le cas k = 1, la courbe du chien est la caustique par réflexion pour des rayons incidents verticaux d'une logarithmique. |
 |
Voir aussi les spirales anallagmatiques, qui sont les roues associées à ces courbes de poursuite.
II) Cas d'une courbe
de fuite circulaire.
Pour le cercle de centre O et de rayon R,
on obtient le système différentiel : 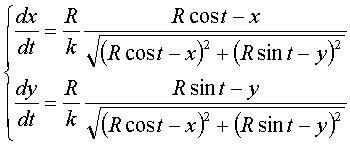 permettant de tracer les courbes à l'aide d'un logiciel.
permettant de tracer les courbes à l'aide d'un logiciel.
Le chien rattrape de nouveau son maître ssi k
< 1 ; lorsque k = 1, la distance chien-maître tend vers
0, mais il ne le rattrape pas ; et lorsque k ³
1, la courbe admet pour cercle asymptote le cercle de centre O et
de rayon R/k, et la distance chien-maître tend vers  .
.
 |
 |
 |
| Vchien = 2 Vmaître : il le rattrape | Vchien = Vmaître : il le rattrape... à l'infini. | Vchien
= 1/2 Vmaître
: sa distance au maître tend vers  et il finit par tourner en rond sur un cercle de rayon R/2.
et il finit par tourner en rond sur un cercle de rayon R/2. |
VARIANTE (sur une idée d'Alain Esculier) : la vitesse
du chien n'est plus proportionnelle à celle du maître, mais
à la distance à celui-ci.
Équation différentielle vectorielle :  . .
Équations du mouvement du chien :  . . |
I) Courbe de fuite rectiligne.
Pour un maître (vt, 0), équations
du mouvement du chien passant par (0, b) :
 (a = v/k).
(a = v/k).
Trajectoire du chien :  . .
La vitesse du chien tend vers celle du maître, et leur distance mutuelle tend vers v/k. |
 |
II) Courbe de fuite circulaire.
Pour un maître  . .
La trajectoire du chien devient asymptote au cercle de centre O et de rayon  ,
sa vitesse tend vers ,
sa vitesse tend vers  ,
et sa distance au maître tend vers ,
et sa distance au maître tend vers  . . |
 |
Une généralisation consiste à considérer
des courbes de poursuite où la vitesse du chien fait un angle constant
avec la droite qui le joint au maître (en allemand, Schielwinkelkurve)
; le cas le plus simple est celui du maître immobile : le chien suit
alors une spirale logarithmique.
Le cas d'un angle droit est étudié à
courbe
de Duporcq.
On peut aussi considérer des courbes de poursuite en 3D, et étudier des systèmes de poursuite.
Voir aussi les barycentriques.
Pour d'autres courbes suivies par des chiens, voir la
courbe
du nageur (chien nageant dans le courant vers son maître sur
la berge) ou la conchoïde
(chien tirant constamment sur sa laisse en direction d'un point fixe).
Comparer aussi avec la courbe
de filature.
| courbe suivante | courbe précédente | courbes 2D | courbes 3D | surfaces | fractals | polyèdres |
© Robert FERRÉOL 2020
 si k = 1.
si k = 1.